


����ע�⣺Ո(q��ng)�������z�����܅���(sh��)����̖(h��o)��С ��ӆ�Δ�(sh��)�������P(gu��n)Ҫ��ɰl(f��)�]�䣺3369838020@qq.com���҂����o����(y��u)�ݵăr(ji��)��(li��n)ϵ�ˣ��̽�(j��ng)����13961378590��QQ��3369838020����(sh��)�w�S�����a(ch��n)�������F(xi��n)؛���������l(f��)��(l��i)늃r(ji��)�����(y��u)�ݣ�
�z����ϴ�b���������Y(ji��)�����ׁG�����}����
�z����ϴ�b���������Y(ji��)�����ׁG�����}���������Ƴ�һ�N�܉��Ԅ�(d��ng)�z�y(c��)�z��(sh��)������돽���Ԅ�(d��ng)�O(ji��n)�y(c��)�b�á���(du��)���ɼ����z��D���M(j��n)�ЈD��ƴ��,ȥ���؏�(f��)����,Ȼ����ûҶ�׃�Q���D��ƽ����һϵ���A(y��)̎���㷨ȥ��,ȥ���Y(ji��)�ϻ���С�`��ָ�ĻҶȈD��ֵ��׃�Q��(du��)�D���M(j��n)�зָ�,�õ�Ŀ��(bi��o)���_�ķָ�D��,��,���ö�ֵ�D��ͶӰ׃�Q,�M(j��n)���z��λ�ö�λ,�@���z��Ĕ�(sh��)����ĥ�p��r�����ԇ�(y��n)�Y(ji��)������,�㷨���кܺõČ�(sh��)�r(sh��)�Ժ���Ч�ԡ�ԓ�z����ϴ�b�õijɹ��������a(b��)�ˇ�(gu��)��(n��i)�հס�
�ڰl(f��)��^����,�������ܱڕ�(hu��)���F(xi��n)��ͬ�̶ȵ��۹�Ӱ��������Q��,��əC(j��)�M��ս���,���Ӱl(f��)�ú�ġ�Ŀǰ,�����(sh��)늏S��(du��)�������ĽY(ji��)����Ҫ�Dz��������Ը߉���ϴ���k���M(j��n)��̎��,���z����ϴ�b�����������z����ϴ�b����������W(w��ng)���z��ݔ�ͱá��b���ҡ����������z���y�T��·�Ȳ����M�ɵ�,��D1��ʾ���������߉�ˮ�������Ì�������������s�܃�(n��i)�����坍�z��D�^��s��,��(du��)��s���M(j��n)�з���(f��)��ϴ,��ϴ��������s�܃�(n��i)�۹��������s�|(zh��)���Ķ����Ԍ�(sh��)�F(xi��n)���L(zh��ng)��s��ʹ�É�������߰l(f��)늏S��(j��ng)��(j��)Ч�桢���ϙC(j��)�M��ȫ�\(y��n)�е�Ŀ�ġ����z����ϴ�b��ϵ�y(t��ng)�坍Ч���ܷ��_(d��)����,��ه���z��(g��)��(sh��)�Ƿ��������z��돽�Ƿ����Ǵ����@�ӻ��ǘӵ�ԭ��?q��)�����ϴ�^�����z��Ķ���,���F(xi��n)�G��F(xi��n)��,��������z��ĥ�p,�@��ֱ��Ӱ��˓Q��Ч����
Ŀǰ,��(gu��)��(n��i)늏S�д��ö����˹��z��ķ����Д��Ƿ���Ҫ�����Q��,�M(f��i)�r(sh��)�M(f��i)��,�`���^�����,�����늏S�Ľ�(j��ng)��(j��)Ч���Լ��Ԅ�(d��ng)��ˮƽ,�����_�l(f��)�����z���Ԅ�(d��ng)�O(ji��n)�y(c��)ϵ�y(t��ng)��
�D1�O(ji��n)�y(c��)ϵ�y(t��ng)���bλ��ʾ��D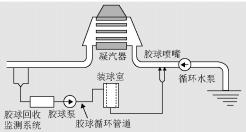
ᘌ�(du��)�z����ϴ�b��ϵ�y(t��ng)�z������ʵ͡������z��(sh��)���z�y(c��)���y�Ȇ��},�аl(f��)�����ù��w��������(du��)ͨ�^�z��Ӌ(j��)��(sh��)���z������Ԅ�(d��ng)�O(ji��n)�y(c��)��,���_�l(f��)������ˮ���ٶȵ�׃���z�y(c��)�ܵ���(n��i)����ϴ�̶ȵ��z����ϴЧ���O(ji��n)�y(c��)�����z����ϴ�b��ϵ�y(t��ng)�M(j��n)����һϵ�еă�(n��i)���C(j��)е����,���Ƴ��������z����ϴ�b��ϵ�y(t��ng)�z������ʻ������_(d��)����99%,������ڵĆ��}���ǟo(w��)���Ԅ�(d��ng)�z�y(c��)�z���ĥ�p�̶ȡ��ɼҹ�˾�Įa(ch��n)Ʒ���҇�(gu��)���ǰ��������z����ϴ�b��ϵ�y(t��ng)���u,ُ(g��u)�r(ji��)���F��
�_�l(f��)һ�N�o(w��)����Qԭ�z����ϴ�b��ϵ�y(t��ng),����ֱ�Ӹ�����ԭ�O(sh��)���ϵ��z������Ԅ�(d��ng)�O(ji��n)�y(c��)ϵ�y(t��ng),��D1��ʾ,�������Ԅ�(d��ng)�رO(ji��n)�y(c��)�����z��Ĕ�(sh��)������돽,�@���\(y��n)���ˆT�Ϳ��Ը���(j��)�z�y(c��)�Y(ji��)���m�r(sh��)�����ӻ���Q�z��,���C�z��Ĕ�(sh��)���Լ��|(zh��)��,�����_(d��)���ѵ���ϴЧ����
1�z������Ԅ�(d��ng)�O(ji��n)�y(c��)ϵ�y(t��ng)��Ӳ�������Լ�ܛ���z�y(c��)��D
�D2�O(ji��n)�y(c��)ϵ�y(t��ng)Ӳ������ʾ��D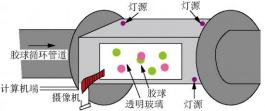
����ܛ��ģ�K���΄�(w��)���Ǐ�һ���ڵ��B�m(x��)�D�����Ԅ�(d��ng)�z�y(c��)�������z��Ĕ�(sh��)����ĥ�p�̶ȡ���ܛ���z�y(c��)��D��D3��ʾ����ͨ�^���I(y��)�z��C(j��)�ɼ��z���B�m(x��)�D��,������(j��)�r(sh��)�g���惦(ch��),Ȼ�����ÈD��ƴ���㷨ȥ��ÿ?j��)ɷ��B�m(x��)�D��֮�g���؏�(f��)����,���M(j��n)�лҶ�׃�Q���D��ƽ����һϵ���A(y��)̎���^��ȥ��,ȥ�����û���С�`��ָ�ĻҶȈD��ֵ��׃�Q��(du��)�D���M(j��n)�зָ�,�õ�Ŀ��(bi��o)���_�ķָ�D��,��,�ڴ˻��A(ch��)��,�M(j��n)���z��λ�ö�λ,�@���z��Ĕ�(sh��)����ĥ�p��r��
�D3ܛ���z�y(c��)��D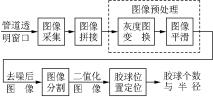
2�D��ƴ��
Ҫ��ӛ�ˮ��ѭ�h(hu��n)һ���ڃ�(n��i)�������z��(sh��),��회�(du��)��ˮ������(d��ng)�z�����������(d��ng)�����M(j��n)�ЈD��ɼ�,�鱣�C�D����B؞���c������,Ӳ�����ÈD��ɼ����ڞ�10cm��10cm,������ܛ�����Ĕz�l���O(sh��)��40Hz���@���mȻ�܉��ψD��(hu��)ȱʧ,��ͬ�r(sh��)������B�m(x��)�ɷ��D��֮�g���λ�ÈD����؏�(f��)�����,����Ȍ�(du��)ÿ?j��)ɷ��B�m(x��)�D���M(j��n)�ЈD��ƴ��,���؏�(f��)����ȥ����
����ÿ?j��)ɷ��D��ļ�ƴ��λ��,���IJ�ȡ��ƴ�ӷ�����:��(du��)�����ăɷ��D�����,ǰһ�����ľ�������ͺ�һ�����ľ������������غϲ��ֵġ��ڱ�����,ͨ�^���ڴ�С�Լ��l�ʵļ��O(sh��)��,ʹ���غϲ��ִȃH��η��D���1/10,�@�O��p����ƴ���㷨��ƥ����g,ͬ�r(sh��)Ҳ�s����ƴ�ӕr(sh��)�g�����,ƥ��r(sh��)ֻ����ǰһ���D����߅��1/10�Ŀ��g�ж��xһ��(g��)����ģ��(��һ��(g��)���؞�����,�����Լ����x),�քeӋ(j��)���@��(g��)ģ�������������c(di��n)�c��һ���D��������(du��)��(y��ng)��λ�õ������c(di��n)��RGB���ƽ����,�õ���С���ǂ�(g��)ֵ�r(sh��)�������c(di��n)��λ��,�����ƥ��λ��,����ӛ���(l��i),����ǰһ���D����Ұ���c��һ���D��������M(j��n)��ƴ�ӡ��@����ѭ�h(hu��n)�����ЈD��ȫ����v,�ҵ�ÿ?j��)ɷ��D��ļ�ƥ��λ��,���ɵõ�?j��ng)]���؏�(f��)�����B�m(x��)������(d��ng)���档
3�D���A(y��)̎��
3.1���ɫ�D(zhu��n)�Q��ҶȈD
���ɫ�D�а������_(d��)224�N�ɫ,�y�ڌ�(sh��)ʩ��(du��)��,����ͨ�������D(zhu��n)��ҶȈD�������ɫ�D�ҶȻ����S���,���б��^���õķ�����ƽ��ֵ������ֵ�����ә�(qu��n)���͆�ɫ����ƽ��ֵ��,���nj��D���R��G��Bֵ��ƽ��,Ȼ��ƽ��ֵ����ҶȈD�ĻҶ�ֵ;��ֵ��,����������R��G��Bֵ�Ĵ�ֵ,�����ֵ����ҶȈD�ĻҶ�ֵ;��ɫֵ��,���nj��D���R��G��Bֵ���κ�һ��(g��)ֵ����ҶȈD�ĻҶ�ֵ��
��Ȼ���е������ɫ�������ɼt(R)�G(G)�{(l��n)(B)��ԭɫ�M�϶���,RGBɫ��ϵ�y(t��ng)��ͨ�^��R��G��B�@3�N�ɫ��Ӯa(ch��n)�������ɫ,�dz��õ��ɫϵ�y(t��ng)��YUV�DZ��W���ҕϵ�y(t��ng)���õ�һ�N�ɫ���a����(����PAL)�����С�Y����ʾ������(luminance��Luma),���Ҷ�ֵ;����U���͡�V����ʾ�Ąt��ɫ��(ChrominanceChroma),����������Ӱ��ɫ�ʼ�Ͷ�,����ָ�����ص��ɫ�������ȡ���ͨ�^RGBݔ����̖(h��o)��(l��i)��(chu��ng)����,�����nj�RGB��̖(h��o)���ض����֯B�ӵ�һ��YUV�cRGB֮�g��������(du��)��(y��ng)�P(gu��n)ϵ:0.229-0.1480.615[Y,U,V]=[R,G,B]0.587-0.289-0.5150.1140.437-0.100����Y�����ˈD��ĻҶ�ֵ,������Y�����܉��ʾ�������c(di��n)�ĻҶ�ֵ��:Y=R��0.299+G��0.587+B��0.114����ʽ,����(j��)�D���R��G��Bֵ���Yֵ,Ȼ�������c(di��n)��R��G��Bֵ���xֵ��Y,���܌����ɫ�D�D(zhu��n)�Q�ɻҶȈD���D4���\(y��n)�ô˷��D(zhu��n)�Q�ɵĻҶȈD��
�D4���ɫ�D(zhu��n)�Q��ҶȈD
3.2�D��ƽ��
�D��ƽ����Ҫ�Ǟ����������������������������ܿ���Ҋ��ʧ���׃��,��Щ��ֻ�����M(j��n)�ЈD��̎��r(sh��)�ſ��l(f��)�F(xi��n)������ȥ����,�б�Ҫ��(du��)�D���M(j��n)��ƽ��,���Բ��õ�ͨ�V���ķ���ȥ�����l�ɔ_���D��ƽ�����������l�ɴ��,�ڿ�����,�D��ƽ���ij��÷����Dz����z����ϴ�Ԅ�(d��ng)�O(ji��n)�y(c��)�b�õ��о�367ֵ�V������ֵ�V����
ᘌ�(du��)ˮ�����z��D������c(di��n),���IJ����˾�ֵ�V��,������һ��(g��)���攵(sh��)�c(di��n)�Ļ���(d��ng)���ھ���ڈD���ϻ���(d��ng),�����������c(di��n)��(du��)��(y��ng)�ĈD�������c(di��n)�ĻҶ�ֵ�ô��ڃ�(n��i)�ĸ���(g��)�c(di��n)�ĻҶ�ֵ��ƽ��ֵ���档��:�ٶ�һ��1��1��(g��)���صĈD��f(x,y),ƽ��̎����õ�һ���D��g(x,y),g(x,y)����ʽ?j��ng)Q��:��0(t)=��1(t)=���ӱ��ķ���;ti[i-��0(t)]2h(i)p0(t)maxi[i-��1(t)]2h(i)p1(t)(m,Sf(m,n)����,x,y=0,1,2,��l-1;S��(x,y)�c(di��n)�������c(di��n)������(bi��o)�ļ���;M�Ǽ��σ�(n��i)����(bi��o)�Ŀ���(sh��)����ʽ�f��,ƽ�����ĈD��g(x,y)�е�ÿ��(g��)���صĻҶ�ֵ���ɰ�����(x,y)���A(y��)�������е�f(x,y)�Ďׂ�(g��)���صĻҶ�ֵ��ƽ��ֵ��(l��i)�_�������IJ��õ���һ��(g��)3��3�����ڡ�
����,Ҫע��һ�c(di��n),���ô��ڒ���D���^����,��(du��)�ڈD���4��(g��)߅���������c(di��n),�M(j��n)��������̎��,��t,߅����Ҳ��(hu��)��(du��)��(sh��)�(y��n)�Y(ji��)������^��Ӱ푡�ƽ���Y(ji��)����D5��ʾ��
�D5�D��ƽ���Y(ji��)��
����С�`��ָ�ĻҶȈD��ֵ��׃�Q�ҶȈD�Ķ�ֵ��׃�Q���nj�һ���ҶȈD�D(zhu��n)�Q�ɺڰ�ֵ�D���w��������ָ��һ��(g��)�ֵ,����D����ij���صĻҶ�ֵС��ԓ�ֵ,�tԓ���صĻҶ�ֵ�O(sh��)�Þ�0(��),��t�O(sh��)��255(��)��׃�Q����(sh��)���_(d��)ʽ����(x<T)(x��T)����,T��ָ�����ֵ���ֵ�xȡ�LjD��̎���еĻ������},ֱ��Ӱ푈D��Ŀ��(bi��o)�R(sh��)�e��ۙ����Ҫ�n�}֮һ����(gu��)��(n��i)��W(xu��)��ᘌ�(du��)�@һ�n�}�M(j��n)���ˏV��������о�,����ܶ��ֵ�xȡ����������С�`�,��Ŀ��(bi��o)��С����Ӱ�С,��(du��)СĿ��(bi��o)�D���Ծ��кõķָ�Ч��,��һ�N��Փ��(y��n)�ܡ�Ч���ѵ��ֵ�xȡ������
���ĸ���(j��)�z��D������c(di��n),������С�`��ָ��㷨�M(j��n)���ݶȈD��ָ��С�`���ȡ���ֵ��Ӌ(j��)�㹫ʽ����:J(t)=1+2��[p0(t)ln��0(t)+p1(t)ln��1(t)]-2��[p0(t)lnp0(t)+p1(t)lnp1(t)]��ʽ��Ӌ(j��)��D��ѷָ��ֵ���Д���(zh��n)�t����(sh��),����ʾ��С�e(cu��)�`�ָ���ʵĆ��}������:p0(t)=ih(i),p1(t)=ih(i)���Ęӱ�����(sh��);��0(t)=i��i,��1(t)=���ӱ��ķֲ���ֵ������,min��D����С�Ҷ�ֵ,max���Ҷ�ֵ��ͨ�^ѭ�h(hu��n)Ӌ(j��)��ÿ��(g��)tֵ��(du��)��(y��ng)��J(t),�����ҳ�J(t)Сֵ��(du��)��(y��ng)��t,����ָ�ļ��ֵ��t3=ArgminJ(t)(��(du��)��256��(j��)�ҶȈD,l=255)i��{0,1,��,l}�ɈD6�ɷN̎���Y(ji��)����֪:����С�`��ָ��㷨�@�õĶ�ֵ���D��Ч�����á�
�D6�D��ָ��Ķ�ֵ���D��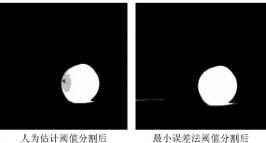
5�z��λ�ö�λ
������֪,���l����(du��)�D��̎���Y(ji��)���������P(gu��n)��Ҫ��Ӱ푡��b�ڴ�,���z����ϴ�b���ڷ��]�ܵ���(n��i)��(c��)��ͬ�Ƕ�������һ����(sh��)�����l�W��,�@��Ч�ر����˹��ղ���(w��n)����������F(xi��n)���Լ��D�����Ӱ�ij��F(xi��n)���ڵõ��ָ��Ķ�ֵ���D��Ļ��A(ch��)��,����ˮƽ/��ֱͶӰ׃�Q���Ɍ�(sh��)�F(xi��n)�z���߅�綨λ�������^ˮƽ/��ֱͶӰ׃�Q���nj��D���ij��(��ij��)ͶӰ��ˮƽ(��ֱ)�S,��ԓ��(��)�ĺ��c(di��n)(����c(di��n))��(sh��)Ŀ�ۼ�����(l��i)���@�����(j��)��Ҫ,��ÿһ�����صĺ��c(di��n)��(sh��)���ۼӵõ��D����ˮƽ�����Ϻ������c(di��n)�ķֲ�����(sh��),����(j��)�������c(di��n)�ķֲ�,��(l��i)�_���z�������߅�������߅��,�Ķ��@���z��Ĕ�(sh��)���Լ��돽����λ�Y(ji��)����D7��ʾ��
�D7�z��λ�ýK��λ�Y(ji��)��
